
Unidade de Controle
Neste módulo vamos entrar mais a fundo no estudo das CPUs e vamos apresentar a Unidade de Controle, principal unidade dos processadores. Conhecer a Unidade de Controle é essencial para o entendimento de como as instruções são executadas pelo computador.
Introdução
A Unidade de Controle, como visto no módulo anterior, é a unidade interna à CPU responsável (como o próprio nome já diz) pelo controle da execução das instruções. Como a CPU é uma máquina de executar instruções, a Unidade de Controle é quem controla o principal funcionamento do computador.
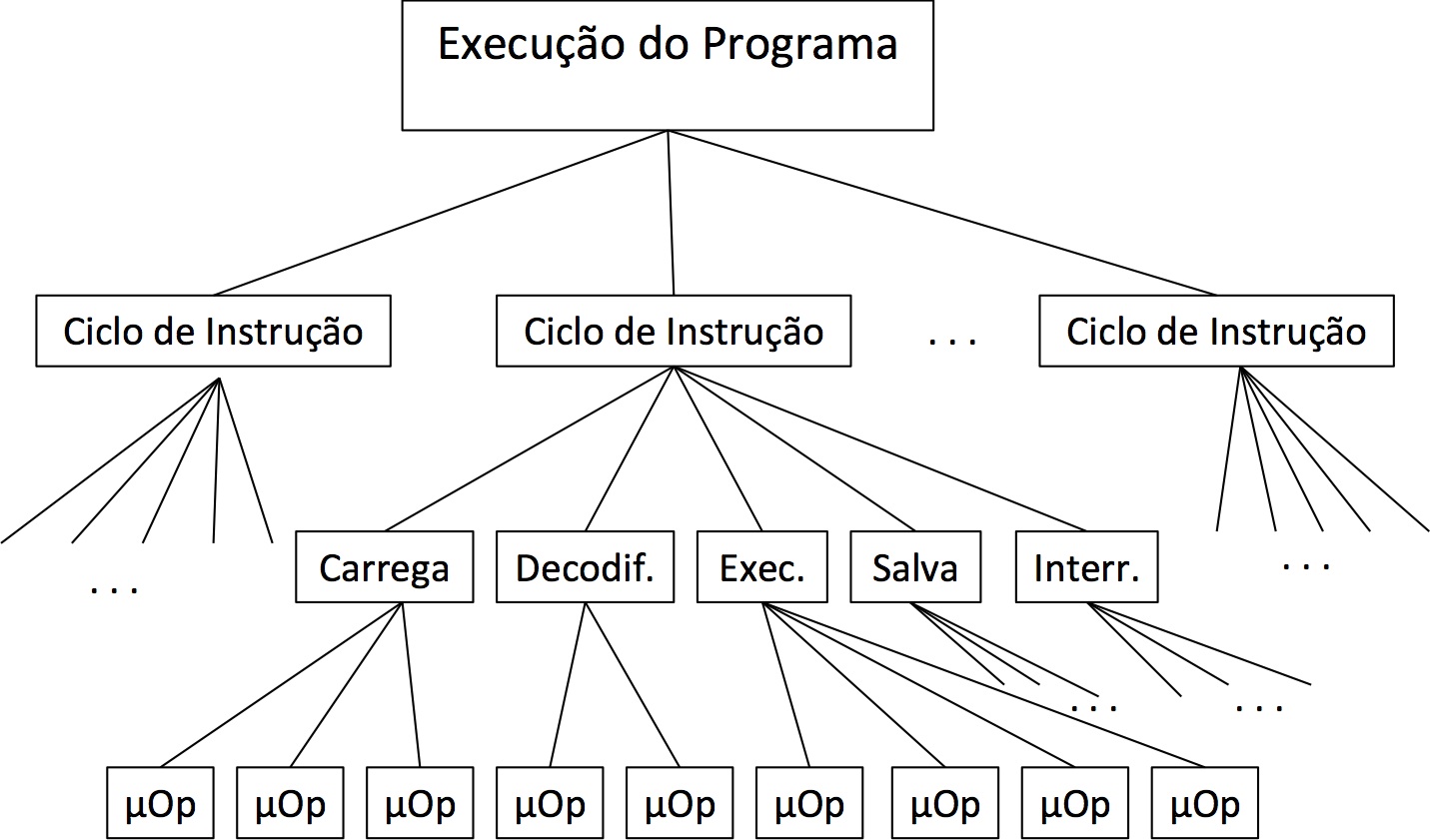
O projeto de uma Unidade de Controle varia de arquitetura para arquitetura, mas há alguns pontos que são comuns a todas elas. Toda Unidade de Controle trabalha com a execução de Microoperações. Como pode ser visto na figura “Execução em Microoperações”, um programa é sempre executado instrução por instrução. Essas seriam instruções de máquina, compiladas a partir de Assembly, ou antes a partir de uma linguagem de alto nível e depois compiladas para Assembly. Cada instrução é executada através de um Ciclo de Instrução, como visto no módulo anterior. Nessa ilustração o ciclo de instrução foi apresentado em cinco estágios (Carrega instrução, decodifica, executa, salva resultados e checa interrupção). Mas ele pode variar de acordo com a arquitetura da Unidade de Controle e também de acordo com o tipo de instrução. Uma instrução com vários parâmetros que estão na memória, por exemplo, pode necessitar de um estágio a mais antes da execução para buscar os dados na memória. Já outra que utiliza apenas dados de registradores pode omitir esse passo e executá-lo no próprio estágio de execução.
Microoperações
Ainda na figura “Execução em Microoperações” pode ser visto que cada estágio do Ciclo de Instrução é quebrado em sub-estágios, chamados de Microoperações. A Microoperação é a operação atômica (indivisível) realizada pela Unidade de Controle para a execução de cada estágio. Cada vez que um estágio do Ciclo de Instrução for executado, as devidas Microoperações são executadas pela Unidade de Controle.
Essa organização é necessária para melhorar a organização da CPU e facilitar o projeto das Unidades de Controle. Além disso, nos projetos de Unidades de Controle modernas, é possível reutilizar Microoperações de um estágio em outro. Por exemplo, para executar uma instrução, é necessário executar uma Microoperação para buscar um dado que está em um registrador (ou memória) para a ULA. Se houver vários dados envolvidos, a única tarefa a ser realizada é pedir para a Unidade de Controle executar a mesma Microoperação de buscar dado, mas agora com endereço diferente.
Dessa maneira, todas instruções que chegam à Unidade de Controle são quebradas em estágios (lembre-se do Pipeline), que por sua vez, separados em sequências de Microoperações e, só então, são executadas. Agora vamos apresentar alguns exemplos de como os principais estágios de execução são organizados em Microoperações.
Busca de Instrução
Neste estágio uma nova instrução deve ser buscada da memória e trazida para a CPU para que possa ser decodificada e executada em seguida. O endereço da instrução a ser buscada está sempre no Contador de Programa (PC) e a instrução buscada da memória é armazenada no Registrador de Instrução (IR). Vamos então apresentar como seriam as Microoperações para realizar a Busca de Instrução.
A seguir cada Microoperação é apresentada ao lado de uma determinação do tempo em que ela será realizada. Nesse caso, três unidades de tempo são necessárias (t1, t2 e t3). Imagine que cada unidade de tempo é 1 ciclo de clock (as microoperações mais complexas levam mais tempo do que isso).
t1: MAR <- (PC) Memória <- fetch; t2: MBR <- (memória) PC <- (PC) + 1 t3: IR <- (MBR)
No tempo t1 o endereço guardado no registrador PC é copiado para o registrador MAR, que é o registrador conectado ao Barramento de Endereço. Ao mesmo tempo, a CPU envia para a memória um sinal de “fetch”, indicando que precisa ser trazida uma nova instrução. No tempo t2 a memória lê o endereço contigo no Barramento de Endereço (que é sempre o mesmo de MAR), busca a instrução e a escreve no Barramento de Dados. Como o MBR sempre reflete aquilo que está no Barramento de Dados, o MBR agora contém a instrução trazida da memória. Esta tarefa é realizada essencialmente pela memória, a ULA está livre para executar outra Microoperação, e aproveita para adicionar 1 ao endereço do PC. Esta operação de incremento vai garantir que a próxima instrução a ser buscada será a do endereço seguinte da memória. Finalmente, no tempo t3, a instrução que foi trazida da memória e salva em MBR pode ser agora salva em IR.
A instrução precisa sempre estar em IR porque na fase de decodificarão, a Unidade de Controle vai buscar lá que instrução deve executar.
Observe que a mesma Microoperação poderia ser executada de forma diferente, como mostrada a seguir.
t1: MAR <- (PC) Memória <- fetch; t2: MBR <- (memória) t3: PC <- (PC) +1 IR <- (MBR)
Nesta segunda opção, o incremento de PC foi passado para o tempo t3, ao invés de t2, o que gera o mesmo resultado.
A quantidade de Microoperações que podem ser executadas no mesmo ciclo de clock depende da arquitetura do processador. Por exemplo, se há apenas uma ULA, então só é possível executar uma única operação lógica, ou aritmética a cada ciclo de clock. O mesmo serve para o uso acesso à memória com MAR e MBR. Se houver um barramento exclusivo para instruções, separado do barramento de dados e uma memória de instrução separada da memória de dados (quase todos processadores hoje possuem), e então é possível buscar uma instrução no mesmo ciclo de clock que se busca um dado.
Busca indireta
Outro tipo de Microoperação muito utilizado é a Busca Indireta. Ela trata de buscar um dado que está na memória e trazer para a CPU para ser utilizado pela instrução. O termo “indireta” indica que o dado não está diretamente na CPU (em um registrador) mas na memória.
Imagine que a instrução em questão seja a soma de 2 números A e B, ambos na memória. Esta instrução foi buscada no estágio anterior, portanto no ciclo seguinte ela estará no registrador IR. Então, os endereços de A e B estão presentes na instrução que agora está em IR. A Busca Indireta deve então ser realizada para A e depois para B, da seguinte forma:
t1: MAR <- (IRendereco) Memória <- read t2: MBR <- (memória) t3: ACC <- (MBR)
No primeiro instante t1 o endereço do dado contido em IR é passado para o registrador de endereço MAR. Ao mesmo tempo a CPU envia para a memória um sinal de leitura (read), avisando que deve ser feita uma busca indireta. No instante seguinte, t2, o conteúdo do dado é trazido da memória para o MBR através do Barramento de Dados, e no último passo, em t3, o conteúdo agora em MBR é levado para um registrador para que seja utilizado na operação, geralmente o Acumulador (ACC).
Execução
Após a busca da instrução e dos dados necessários, é hora de executar a instrução na Microoperação de execução. Mantendo o exemplo da soma A e B apresentado anteriormente, a Unidade de Controle terá que fazer a Busca Indireta de A e B para depois realizar a soma. Supondo que A seja salvo em ACC, ele deve ser transferido para outro registrador, digamos R1 antes de Busca Indireta por B. Assim, a execução seria:
t1: R1 <- ACC // Busca indireta por B: t2: MAR <- (IRendereco) Memória <- read t3: MBR <- (memória) t4: ACC <- MBR t5: ACC = R1 + ACC
Em t1 o conteúdo de A salvo em ACC será transferido para o registrador R1. Nos intervalos de t2 até t4 seria feita a Busca Indireta por B. E, finalmente, no instante t5 a soma de R1 e ACC seria realizada e salva no acumulador ACC.
Salvar resultado
Após esse último passo, o conteúdo de ACC com o resultado da operação deve ser transferido para o local de destino. Isso é feito no estágio de Salvar Resultado. Se o resultado for salvo num registrador, a operação é direta e feita num único ciclo de clock. Mas se precisar salvar o resultado na memória, uma escrita indireta deverá ser realizada para salvar o conteúdo de ACC na memória.
t1: MAR <- (IRendereco) t2: MBR <- ACC Memória <- write
Para tal, inicialmente em t1 o endereço da variável de memória que precisa ser salva é passado para o MAR. O conteúdo de ACC é passado para o MBR no ciclo seguinte (t2), ao mesmo tempo em que a CPU envia para a memória um sinal de escrita. Ao receber esse sinal, a memória traz o conteúdo de MBR e o salva no endereço representado por MAR.
Salto condicional
Uma instrução muito comum executada pelos computadores são os saltos condicionais. Ela indica que se uma determinada condição for satisfeita, a execução não deve ser a da instrução seguinte, mas a indicada pela instrução. Imagine uma instrução “Salta se zero”, com dois parâmetros, X e Y. O X seria a variável a ser testada e o Y o endereço para onde a execução deve saltar caso o valor de X seja 0.
Desta forma, as microoperações seriam as seguinte:
// Busca indireta por X: t1: MAR <- (IRenderecoX) Memória <- read t2: MBR <- (Memória) t3: ACC <- (MBR) t4: se ACC == 0, PC = (IRenderecoY)
Inicialmente, de t1 a t3, seria buscado o conteúdo de X na memória. No último ciclo t4, o conteúdo de ACC seria comparado com 0 e se forem iguais, o conteúdo de PC será o endereço da variável Y, também presente em IR. Observe que, caso contrário, nada precisa ser feito, o PC continuará como antes e a próxima instrução depois da atual será executada.
Tipos de Microoperações
Como já foi possível observar através dos exemplos apresentados, há quatro tipos básicos de Microoperações de uma Unidade de Controle. São eles:
- Transferência de dados entre registradores
- Transferência de dados de registrador para o exterior da CPU
- Transferência de dados do exterior da CPU para um registrador
Operação lógica e aritmética
A transferência de dados de um registrador para outro é a mais simples das Microoperações e geralmente é feita num único ciclo de clock. Já a movimentação de dados de ou para o exterior da CPU pode ser mais complexa. Para facilitar muitos computadores mapeiam todos dispositivos de Entrada e Saída com se fossem memória. Ou seja, para a CPU, enviar um dado para um dispositivo seria como escrever um dado na memória, bastando usar um endereço diferente. Isso facilita bastante a operação da Unidade de Controle, mas pode limitar a quantidade de endereços de memória disponíveis para os programas. As operações de transferência de dados são complexas também porque levam um tempo não conhecido para serem executadas. Se o dado estiver na memória Cache o acesso é mais rápido, se estiver na Memória Principal levará mais tempo, e se tiver num dispositivo externo, um Disco Rígido, por exemplo, pode levar ainda mais.
As operações lógica e aritméticas podem ser mais rápidas ou mais lentas dependendo de cada uma delas. Operações com números de Ponto Flutuante tendem a levar mais tempo do que aquelas com números inteiros. Já as operações trigonométricas são as mais lentas que o computador pode operar.
Decodificação
A execução das Microoperações é sempre ordenada pela Unidade de Controle. Isso é feito no estágio de Decodificação, a partir da leitura da instrução presente em IR. O primeiro da decodificarão é ler o código da instrução para conhecer seu tipo. Dependendo do tipo, a instrução é quebrada numa quantidade específica de Estágios e cada estágio no seu respectivo grupo de Microoperações. Cada vez uma que Microoperação se encerra, a Unidade de Controle checa qual será a próxima e envia os sinais para os devidos registradores, para ULA e dispositivos envolvidos, como memória ou dispositivos de Entrada e Saída.
Dessa forma, podemos dizer que a Unidade de Controle possui duas funções principais, a execução e o sequenciamento das instruções. Nessa última função a Unidade de Controle deve saber o exato momento que uma Microoperação concluiu para executar a próxima, e quando a última Microoperação for executada, iniciar um novo Estágio, e quando o último Estágio for concluído, executar a próxima instrução do programa.
Glossário
PC (Program Counter)
Contador de Programas
IR (Instruction Register)
Registrador de Instrução
MAR (Memory Address Register)
Registrador de Endereço
MBR (Memory Buffer Register)
Registrador de Dados
ULA
Unidade Lógica e Aritmética
UC
Unidade de Controle
FI
Ciclo carregar instrução. Traz a instrução da memória para o processador, armazena em [IR] (essa etapa também é chamada de Fetch de Instrução) e a decodifica para execução no passo seguinte.
FO (Fetch operands)
Clico carregar operandos. Traz os operandos da operação dos registradores para a ULA, para que a operação seja realizada sobre eles, também chamada de Fetch de Operandos.
EI (Execute Instructions)
Ciclo executar instruções. Executa operação lógica ou aritmética propriamente dita.
WM (Write to memory) Ciclo escrever em memória
Escreve o resultado da operação em memória, se necessário.
WR (Write to register)
Ciclo escrever em registrador. Escreve o resultado da operação em um dos registradores, se necessário.
Informação Extra
Fim da aula 03